Giáo trình Thiết kế và Chỉnh định PID
Thương hiệu: NGuyễn Đức Tấn | Xem thêm các sản phẩm Lập Trình của NGuyễn Đức TấnMô tả ngắn
Trong số các chiến lược điều khiển kinh điến, bộ điêu khiến PID (Proportional-Integral-Derivative) vẫn là một trong những giải pháp được sử dụng phố biến nhất, nhờ vào cấu trúc đơn giản, ...Còn hàng
288,000 đ




- Giao hàng toàn quốc
- Được kiểm tra hàng
- Thanh toán khi nhận hàng
- Chất lượng, Uy tín
- 7 ngày đổi trả dễ dàng
- Hỗ trợ xuất hóa đơn đỏ
Giới thiệu Giáo trình Thiết kế và Chỉnh định PID
Trong số các chiến lược điều khiển kinh điến, bộ điêu khiến PID (Proportional-Integral-Derivative) vẫn là một trong những giải pháp được sử dụng phố biến nhất, nhờ vào cấu trúc đơn giản, dễ triển khai nhưng lại mang lại hiệu quả cao trong điều khiển các hệ thống tuyến tính và gần tuyến tính. Từ điều khiển nhiệt độ, áp suất, lưu lượng trong công nghiệp chế biến, đến điều khiển tốc độ động cơ, vị trí truyền động trong các hệ truyền động điện - PID đều thể hiện vai trò thiết yếu.Tuy nhiên, để khai thác hiệu quả bộ điều khiển PID, người kỹ sư điều khiển cần hiêu rõ các nguyên lý thiết kế, phương pháp chỉnh định và các yếu tố ảnh hưởng đến hiệu năng hệ thống. Thiết kế bộ điều khiển PID không chỉ là chọn các hệ số Kc, T,, T, một cách tùy ý, mà cần tuân theo các nguyên lý thiết kế cụ thể, có thể dựa trên mô hình hệ thống, đáp ứng thời gian hoặc tần số, hoặc các phương pháp kinh nghiệm thực tiễn. Đồng thời, trong triển khai thực tế, kỹ sư cần hiểu rõ giới hạn phần cứng, đặc tính nhiễu, sai số, khả năng ổn định và các yếu tố thực nghiệm khác để đảm bảo bộ điều khiển hoạt động hiệu quả và an toàn.
"Giáo trình Thiết kế và chỉnh định PID" được biên soạn nhằm cung cấp cho sinh viên trong lĩnh vực điều khiển và tự động hóa những kiến thức cơ bản nhưng cần thiết để thiết kế, chỉnh định và triển khai bộ điều khiển PID trong cả môi trường mô phỏng và thực tế. Giáo trình gồm 5 chương, được trình bày tuần tự từ lý thuyết nền tảng đến ứng dụng thực hành.
Chương 1 giới thiệu các khái niệm cơ bản về cấu trúc, nguyên lý điều khiển, các chế độ P, PI, PD và PID, cũng như các biến thể và hiện tượng phổ biến như tích phân bão hòa, phản ứng chậm hay khuyến nghị lựa chọn cấu hình điều khiến phù hợp.
Chương 2 trình bày chi tiết các phương pháp thiết kế và chỉnh định tham số PID cho các mô hình quá trình bậc nhất hai tham số và bậc nhất ba tham số, dựa trên các tiêu chí thời gian như sai lệch cực đại, thời gian xác lập, chỉ tiêu tích phân IAE, IE..., cũng như các phương pháp cổ điên như Ziegler-Nichols, đáp ứng bước nhảy, hoặc thiết kế theo miền tần số để đảm bảo độ bền vững và hiệu suất.
Chương 3 mở rộng thiết kế sang hệ thống bậc hai, với các kỹ thuật tiên tiến hơn như nắn đặc tính tần số, áp đặt điểm cực mong muốn, thiết kế mô hình nội (IMC), điều khiển nghịch đảo gần đúng, hay tối ưu hóa Hoo nhằm tăng cường khả năng bám tín hiệu và kháng nhiễu. Nội dung chương cũng có phần minh họa bằng lệnh MATLAB để hỗ trợ sinh viên thực hành mô phỏng và áp dụng.
Chương 4 tập trung vào việc thực thi bộ điều khiển PID trong thực tế. Nội dung bao gồm mạch điều khiển PID analog sử dụng op-amp, phân tích các ràng buộc phân cứng như giới hạn điện áp, tốc độ, nhiễu và độ trôi. Tiếp đó là phần triển khai PID số trên vi điều khiển và PLC, với ví dụ cụ thể trên TIA Portal và bộ điều khiển S7-1200. Ngoài ra, chương cũng đề cập đến các bộ PID compact và bộ PID khí nén, giúp sinh viên có cái nhìn toàn diện về các lựa chọn triển khai phù hợp với điều kiện công nghiệp khác nhau.
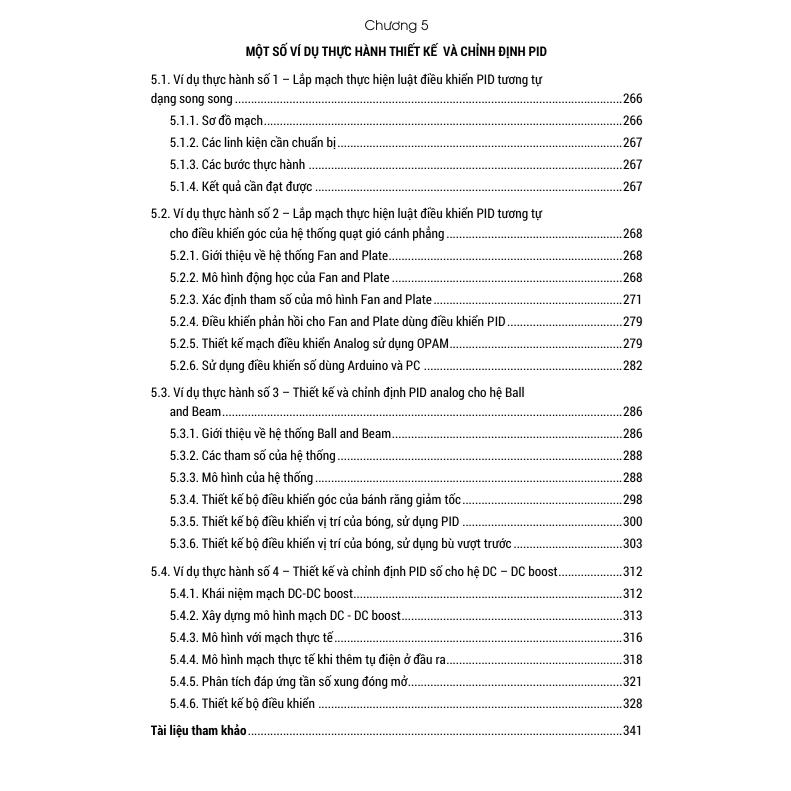
Chương 5 là phần thực hành, với các bài tập mô phỏng, lập trình và lắp ráp thực tế nhằm giúp sinh viên vận dụng được kiến thức lý thuyết vào xử lý tình huống kỹ thuật cụ thể
Loại sách : sách in
Loại bìa : bìa mềm
Tác giả : nhiều tác giả
Năm xuất bản : 2026
Khổ sách : 16 x 24 cm
Số trang: 345
Mã sách : 97860464525174
Nhà xuất bản : Nhà xuất bản Khoa Học - Công Nghệ - Truyền Thông
Đơn vị phát hành : Nhà xuất bản Khoa Học - Công Nghệ - Truyền Thông
#thietkePID #tudonghoa #dieukhientudonghoa #dieukhienvatudonghoa #sachthietkePID #sachtudonghoa #sachdieukhientudonghoa #sachdieukhienvatudonghoa #thietkechinhdinhPID
Giá sản phẩm trên Tiki đã bao gồm thuế theo luật hiện hành. Bên cạnh đó, tuỳ vào loại sản phẩm, hình thức và địa chỉ giao hàng mà có thể phát sinh thêm chi phí khác như phí vận chuyển, phụ phí hàng cồng kềnh, thuế nhập khẩu (đối với đơn hàng giao từ nước ngoài có giá trị trên 1 triệu đồng).....
Hình ảnh sản phẩm

Giá LOCUS
Thông tin chi tiết
| Công ty phát hành | Nhà xuất bản Khoa học - Công nghệ - Truyền thông |
|---|---|
| Nhà xuất bản | Nhà Xuất Bản Đại Học Quốc Gia Hà Nội |
| SKU | 7935096441458 |